使用 ULN2003 驱动 28BYJ-48 步进电机。
要用一个步进电机测试东西,不过需求来的比较突然手边也没有像是A4988或TMC2209这种硬件驱动,于是就用别人的ULN2003驱动和28BYJ-48步进电机来做了,正好给学弟大概说下如何驱动步进电机。
基本概念
-
步进电机:将输入的脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度。
可以通过控制脉冲频率,来控制电机转动的速度和加速度。
-
从这个电机的名字入手28BYJ-48: 28表示电机直径28mm,B代表步进电机,Y代表永磁式步进电机PM,J代表减速型电机带减速箱,48表示四相八拍。
-
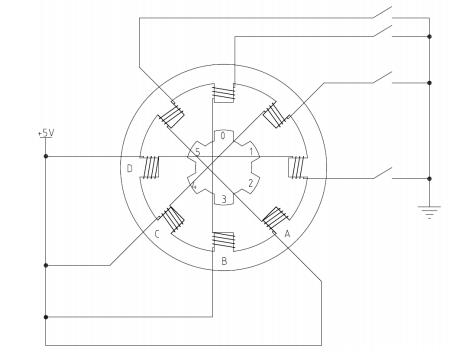
转子:最中间标注为0~5的六个齿。顾名思义,它是要转动的。转子的每个齿上都带有永久的磁性,是一块永磁体,这就是永磁式。
-
定子:外圈的8个齿。它是保持不动的,跟电机的外壳固定在一起。每个齿上都缠上了一个线圈绕组,正对着的2个齿上的绕组又是串联在一起的,也就是说正对着的2个绕组总是会同时导通或关断的,如此就形成了4相,即图中标注的ABCD,相对的2个齿是1相。四相五线多出来那条线是共用的电源线。
-
拍数:完成一个磁场周期性变化所需脉冲数。一拍就是一个脉冲信号。
以四相电机为例,四相四拍为 AB-BC-CD-DA(-AB…), 四相八拍为 A-AB-B-BC-C-CD-D-DA(-A…)
-
步距角(步进角):每接收到一个脉冲信号步进电机转动的角度。
步距角 = 360° / (定子齿数 * 运行拍数)以八拍运行为例,电机主轴的步距角度为:
360/(8*8)=5.625。再除以减速比64,得到输出轴的步距角5.625/64=0.087890625。八拍运行俗称半步,对应四拍运行则为整步。查到步距角参数,也可以反推需要
360/5.625=64个脉冲信号转子才会转动1圈,(因为带减速箱结构所以需要再乘上减速比)64*64=4096个脉冲信号电机主轴才会转1圈。 -
齿轮减速比:这款为1:64。即内部转子转动64圈,外部输出主轴才转动1圈。于是就是需要
64×64=4096个拍数才会让输出轴转过1圈。 -
空载启动频率:也叫极限启动频率或突跳频率,是指步进电机能够不失步启动的最高脉冲频率。这款步进电机是550P.P.S,即正常启动每秒最多给出550个步进脉冲数,即需要单个节拍持续时间(或节拍的刷新时间)至少为
1/550=1.8ms最大空载牵入频率,是指步进电机在空载情况下能够从锁定状态正常启动的最高脉冲频率,即空载启动时最快的驱动拍频率。最大空载牵出频率,即空载转动时最快的驱动拍频率。
当脉冲频率高于空载启动频率,电机不能正常启动,可能发生丢步或堵转。在有负载的情况下,启动频率应更低。
-
如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)
-
保持转矩(又称静力矩):步进电机通电但没有转动时,定子锁住转子的力矩。通常步进电机在低速时的力矩接近保持转矩。
牵入转矩(又称启动力矩)是在某一脉冲频率下,能够克服自身和惯量启动换向和的停车而不失步的最大负载力矩。牵出力矩(运行力矩)是在某一脉冲频率下,连续恒速稳定运行时能够输出而不失步的最大负载力矩。牵出转矩通常大于牵入转矩。
(自)定位转矩,也叫锁住力矩,是电机在没有通电情况下,转动电机所需的力矩,即定子锁住转子的力矩。
-
自启动区域,是步进电机可以直接启动和停止的区域。连续运行区域,是在该区域内, 电机无法直接启动或停止。 电机在该区域内运行必须先经过自启动区域, 然后经过加速达到该工作区域运行。
-
细分(角度细分):一般由硬件驱动器完成。如果主轴转1圈需要200个脉冲,那么2细分就是转1圈需要400个脉冲。细分是通过影响电机的步距角来影响转角和转速。
了解完了基本信息和原理之后
- 可以得出转动一个角度的公式
转动角度所需输出步数 = (角度 * 减速比) * (定子齿数 * 运行拍数) / 360°
-
转速的公式
转速(转/秒) = 脉冲频率(HZ) / (360 / 步距角 * 细分倍数)例如设置PWM波的频率为1kHz(1秒1000个脉冲),42步进电机的步距角是1.8°,在没有细分的情况下,转速为
1000/(360/1.8*1)=5rad/s,即5*60=300rpm -
八拍模式是这类4相步进电机的最佳工作模式。八拍相较于四拍除了能使转动精度增加一倍,也能增加电机的整体扭力输出。
除了单四拍和八拍的工作模式外,还有双四拍(双绕组通电四节拍)。双四拍步进角度同单四拍是一样的,但由于它是两个绕组同时导通,所以扭矩会比单四拍模式大。
28BYJ-48的减速比精度问题
然而实际数一下每个齿轮的齿数,然后将各级减速比相乘,算出的真实的减速比应该为 (32/9)(22/11)(26/9)(31/10)≈63.683950617 并非1:64整。
按真实减速比计算,需要64x63.68...≈4075.7拍主轴才会完整转过一圈。要是按1:64错误地计算那么每转过100.5圈就会使主轴差出来半圈。
后来查了下,在实际应用中28BYJ-48最初的设计目的是用来控制空调的扇叶的,工作环境需要的转动角度也小于180度,也就不需要很高的精度。
代码
/********************************** DEFINE **********************************/
#define MOTOR_PORT GPIOA
#define MOTOR_IN1 GPIO_PIN_4
#define MOTOR_IN2 GPIO_PIN_5
#define MOTOR_IN3 GPIO_PIN_6
#define MOTOR_IN4 GPIO_PIN_7
#define IN1_HIGH HAL_GPIO_WritePin(MOTOR_PORT, MOTOR_IN1, GPIO_PIN_SET);
#define IN1_LOW HAL_GPIO_WritePin(MOTOR_PORT, MOTOR_IN1, GPIO_PIN_RESET);
#define IN2_HIGH HAL_GPIO_WritePin(MOTOR_PORT, MOTOR_IN2, GPIO_PIN_SET);
#define IN2_LOW HAL_GPIO_WritePin(MOTOR_PORT, MOTOR_IN2, GPIO_PIN_RESET);
#define IN3_HIGH HAL_GPIO_WritePin(MOTOR_PORT, MOTOR_IN3, GPIO_PIN_SET);
#define IN3_LOW HAL_GPIO_WritePin(MOTOR_PORT, MOTOR_IN3, GPIO_PIN_RESET);
#define IN4_HIGH HAL_GPIO_WritePin(MOTOR_PORT, MOTOR_IN4, GPIO_PIN_SET);
#define IN4_LOW HAL_GPIO_WritePin(MOTOR_PORT, MOTOR_IN4, GPIO_PIN_RESET);
/******************************** FUNCTION ********************************/
/*
* @function: 八拍驱动
* @notion: 28BYJ-48步进电机delay最小为2ms
*/
static void Phase8_Single(uint8_t step, uint8_t delay)
{
switch (step) {
case 0: IN1_LOW;IN2_HIGH; IN3_HIGH; IN4_HIGH; break;
case 1: IN1_LOW; IN2_LOW; IN3_HIGH; IN4_HIGH; break;
case 2: IN1_HIGH; IN2_LOW; IN3_HIGH; IN4_HIGH; break;
case 3: IN1_HIGH; IN2_LOW; IN3_LOW; IN4_HIGH; break;
case 4: IN1_HIGH; IN2_HIGH; IN3_LOW; IN4_HIGH; break;
case 5: IN1_HIGH; IN2_HIGH; IN3_LOW; IN4_LOW; break;
case 6: IN1_HIGH; IN2_HIGH; IN3_HIGH; IN4_LOW; break;
case 7: IN1_LOW; IN2_HIGH; IN3_HIGH; IN4_LOW; break;
default : break;
}
HAL_Delay(delay);
}
/*
* @function: 转动指定角度
* @param: dir: 0为正转 1为反转
* @notion: 28BYJ-48步进电机delay最小为2ms
*/
void SteppingMotor_TurnAngle(float angle, uint8_t delay)
{
// 转动角度所需输出步数 = (角度 * 减速比) * (定子齿数 * 运行拍数) / 360°
// float tmp = fabsf(angle) * 64 * 8 * 8 / 360.0f; // 减速比1:64
float tmp = fabsf(angle) * 283712.0f / 4455.0f * 8.0f / 45.0f; // 减速比1:63.684
uint16_t steps = (uint16_t)tmp;
if (angle > 0) {
for (uint16_t i = steps; i > 0; i -- ) {
Phase8_Single(i % 8, delay);
}
} else {
for (uint16_t i = steps; i > 0; i -- ) {
Phase8_Single(abs(i % 8 - 7), delay);
}
}
}